El Desafío en Dinámica Robótica
En el diseño de celdas robotizadas y sistemas de automatización, la inercia es el enemigo. Herramentales (EOAT) y eslabones sobredimensionados restringen el desempeño global del sistema.
- Límites de Payload: Herramentales pesados reducen la capacidad de carga útil del robot y fuerzan a usar equipos de mayor capacidad y costo.
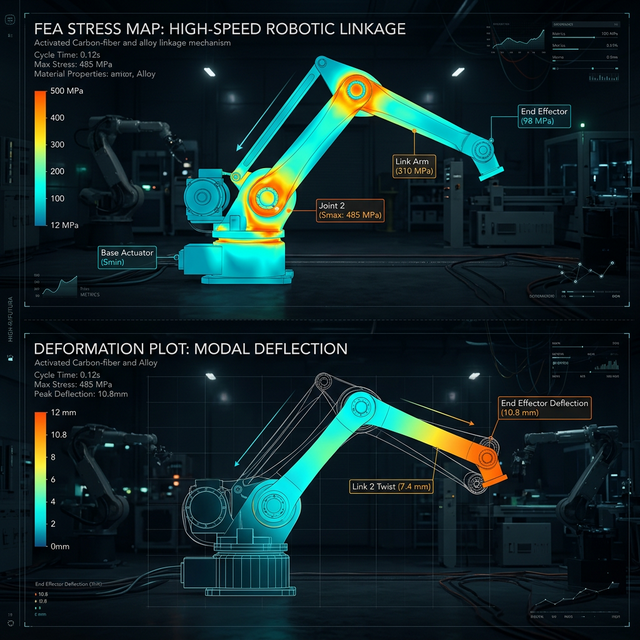
- Tiempos de Ciclo: Componentes de masa elevada retrasan la aceleración, incrementando el tiempo de ciclo general.
- Vibración y Fatiga: Ciclos de alta velocidad generan inercias que desgastan prematuramente los servomotores y articulaciones.
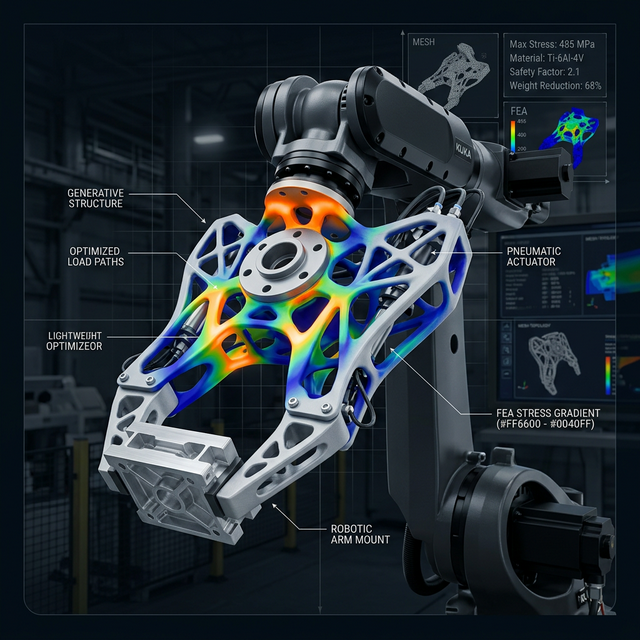
La Solución Corvium
Damos a los integradores la capacidad de reducir el peso de brazos y herramentales sin sacrificar rigidez geométrica, incrementando la agilidad y extendiendo la vida útil de los equipos.